1适用场景
串口转CAN模块在什么时候需要用到呢?一是老产品面临升级,需要用到CAN总线通信,但硬件平台中的MCU没有集成CAN总线的控制器。二是选用的MCU已经包含CAN总线接口,但数量上不能满足项目需求。若出现类似以上两种情况且MCU有闲置串口,则可以选用串口转CAN模块CSM100T解决。
图1 应用行业
2使用方法
该类模块可以很方便地嵌入到具有UART接口的设备中,在不需改变原有硬件结构的前提下使设备获得CAN-bus通讯接口,实现具有UART设备和CAN-bus网络之间的数据通讯。工业级的转换模块内部还包括实现带隔离的CAN和UART转换所必须的模拟和数字器件、光电耦合器、DC/DC变换器、CAN-bus接口等。
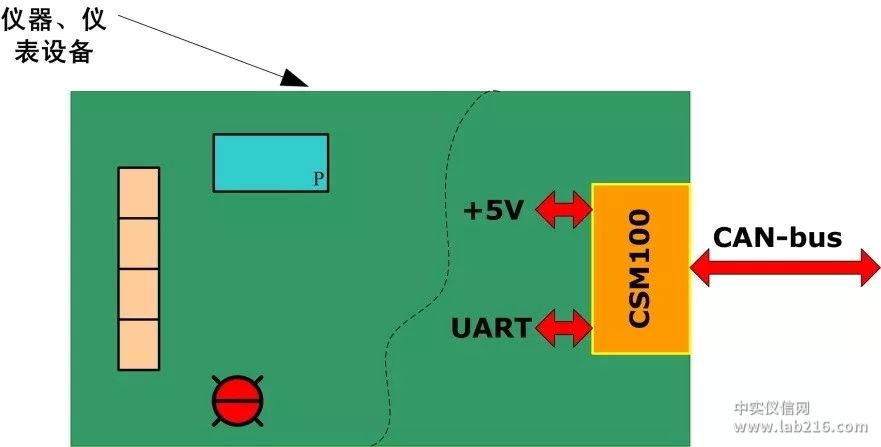
图2 产品架构
3格式说明
CSM100系列模块提供3种协议转换方式:透明转换、透明带标识转换、自定义协议转换。上篇文章已介绍过透明转换模式的转换方法,本文将以CSM100系列的模块简述模块的透明带标识转换格式。
该转换模式串行帧中的“帧ID”自动转换成CAN报文中的帧ID。只要在配置中告诉模块该“帧ID”的地址编号在串行帧的起始位置和长度,模块在转换时提取出这个“帧ID”填充在CAN报文的帧ID域里,作为该串行帧转发时的CAN报文的帧ID。在CAN报文转换成串行帧的时候也把CAN报文帧ID转换在串行帧的相应位置。
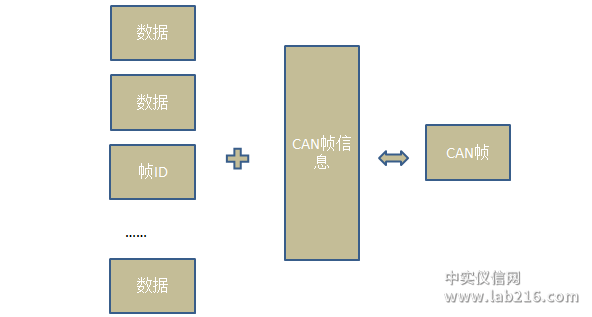
图3 转换方式
对比“透明转换”模式和“透明带标识”模式不难发现它们之间的区别:CAN ID信息来自串口流数据中还是来自模块本身的配置信息中。由于“透明转换”模式下的CAN ID来自模块配置信息,配置信息由上位机软件提供,因此对于使用此模式的节点来说发送的帧ID是固定的。而“透明带标识”模式下不同,它可以一个节点发送多个帧ID 的CAN帧。
4转换形式
串行帧的最大缓冲区长度为255个字节,且处于该模式时串行接收设置有超时时间,即在一定时间内收不到串口数据则默认打包为一帧发送。因此,在透明带标识转换模式下,必须保证模块取得完整的串行数据帧,否则会造成分包错误。

图4 分包方式
透明带标识转换模式下,串行帧转为CAN报文时的形式如图5。需要注意的是,串行帧中所带有的CAN报文“帧ID”在串行帧中的起始地址和长度可由配置设定。起始地址的范围是0~7,长度范围分别是1~2(标准帧)或1~4(扩展帧)。如果在配置中指定帧类型为标准帧,帧ID信息起始地址为3长度为1,则帧ID的有效位只有8位。地址3中的CAN ID1作为标准帧ID的高8位,其余位全部补0。
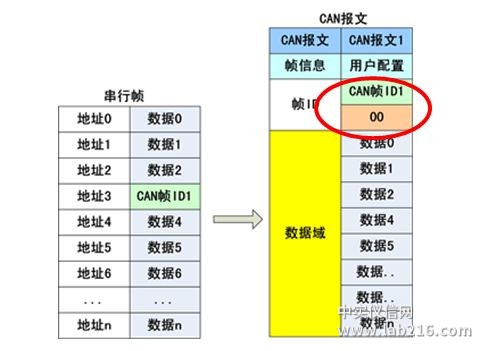
图5 串行帧到CAN帧
透明带标识转换模式下, CAN报文转为串行帧时的形式如图6。若同样配置CAN帧信息为标准帧,帧ID信息为起始3长度1,则转换时将丢失ID0的数据。此时CAN帧 中的数据能正常被接收,但必然缺失帧ID信息(ID0本身不全为0时)。为了正常转换标准帧的帧ID信息,下图的转换情景必须将帧ID信息中的帧长度设置为2。
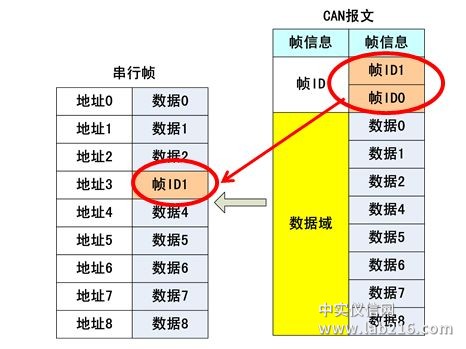
图6 CAN帧到串行帧
5转换示例
假设CAN报文“帧ID”在串行帧中的起始地址是2,长度是3(扩展帧情况下),串行帧发送的数据分别为0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0a,0x0b,0x0c,0x0d,0x0e,0x0f,则转换结果如图7。
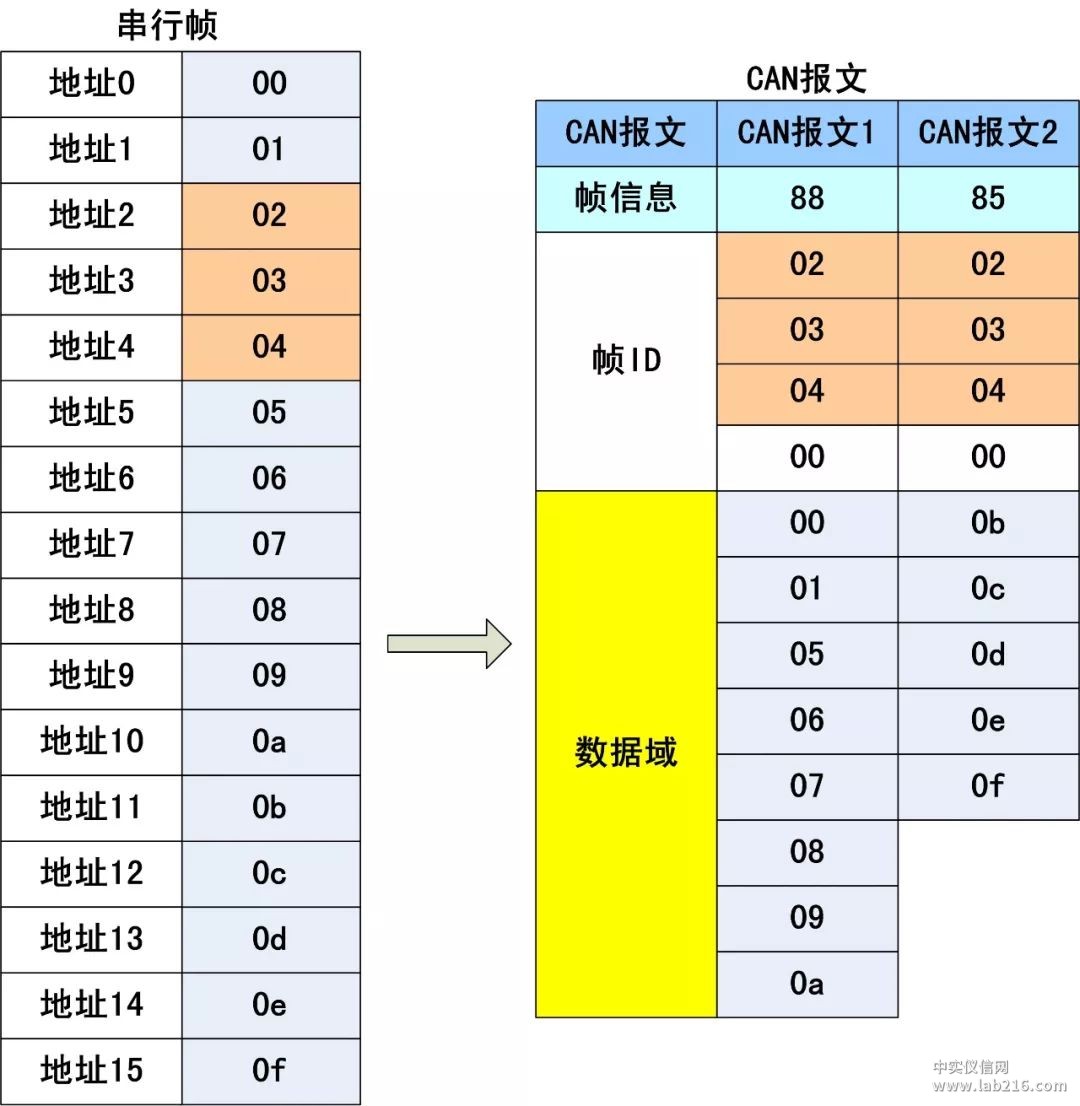
图7 示例1
若配置起始地址是2,长度是3(扩展帧情况下),CAN报文的帧ID为0x00123456,数据为0x55,0x55,0x55,0x55,0x55,0x55则转换结果如图8。
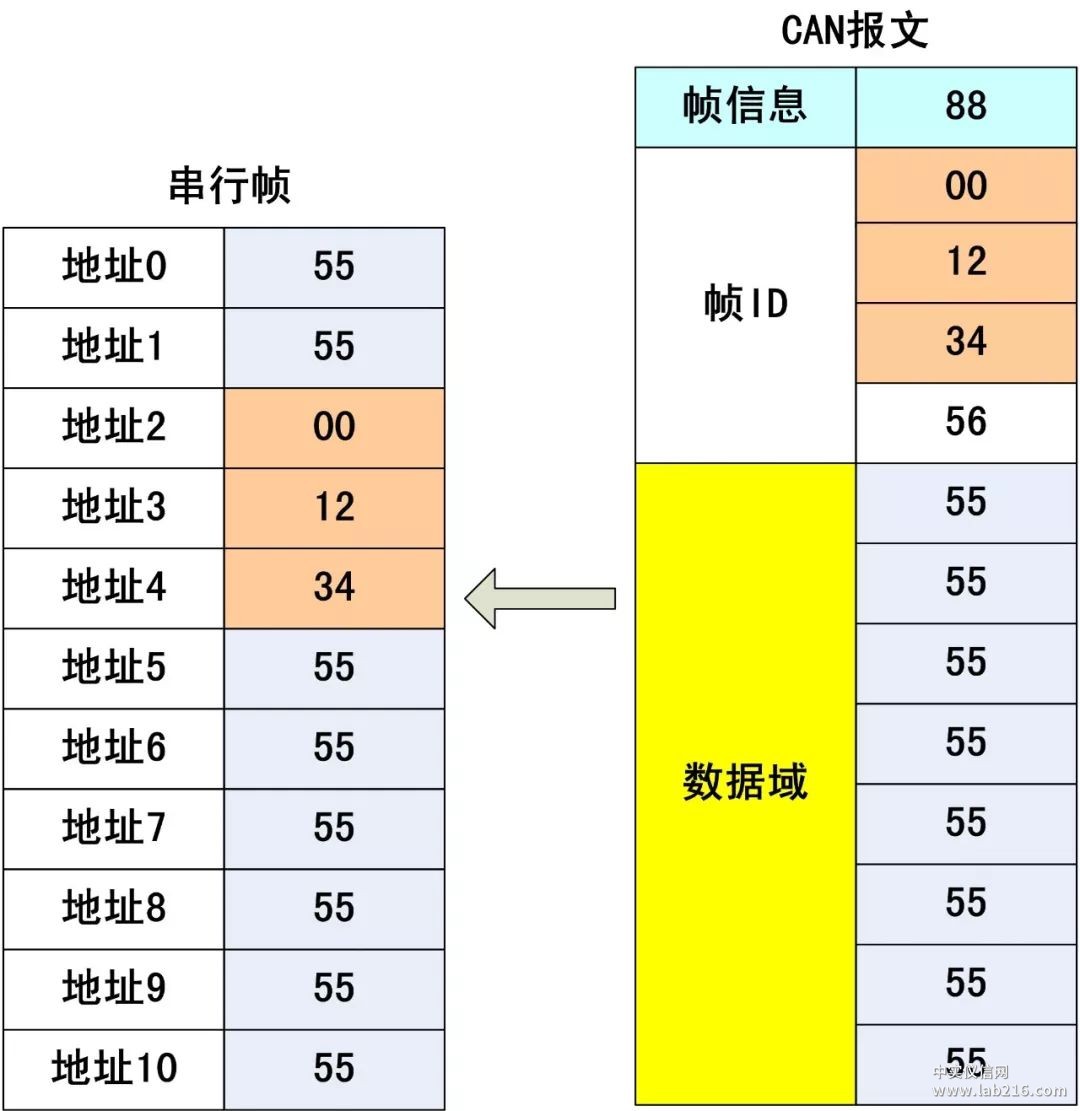
图8 示例2
6总结
以上为串口转CAN“透明带标识”模式下的的转换方式,该模式特点是可以灵活设定一个节点发送的CAN帧ID信息。笔者将介绍透明转换、透明带标识转换、自定义协议转换以及moudbus转换的内容,欢迎关注往期及后期文章。
